MAP-Tk 0.5.0 Release!

MAP-Tk 0.5.0 Release
The MAP-Tk 0.5.0 release offers new functionality including preliminary support for essential matrix estimation and camera initialization algorithms. It further updates the bundle adjustment tool to estimate a similarity transformation to place results in a canonical coordinate system when external constraints are not provided on position, orientation, and scale. In addition, the release features support for image masks to suppress some undesirable tracks in the feature tracking tool.
Also included in this release:
- A new "estimate_homography" tool to compute the homography for a pair of images
- An update to the bundle adjustment tool to optionally accept KRTD camera files as input
- An update to the feature tracker tool to write a source-to-reference homography file
- A CMake option for a library suffix string, allowing platform-specific installation subdirectories (i.e., …/lib64/ vs …/lib/)
- Unit tests for new essential matrix estimation and camera initialization algorithms
A major release (1.0.0) is planned in the coming months that will restructure the code base, add true dynamic plugin loading, use Eigen 3 for linear algebra, add C and Python bindings, and more.
For more information on this release, including updates to the build system, Core Library, VXL Library, tools, etc., and to download the source code, please visit https://github.com/Kitware/maptk/releases/tag/v0.5.0.
About MAP-Tk
The Motion-Imagery Aerial Photogrammetry Toolkit (MAP-Tk) is an open-source C++ collection of libraries and tools for making measurements from aerial video. Its initial capability focuses on estimating the camera flight trajectory and sparse 3D point cloud of a scene.
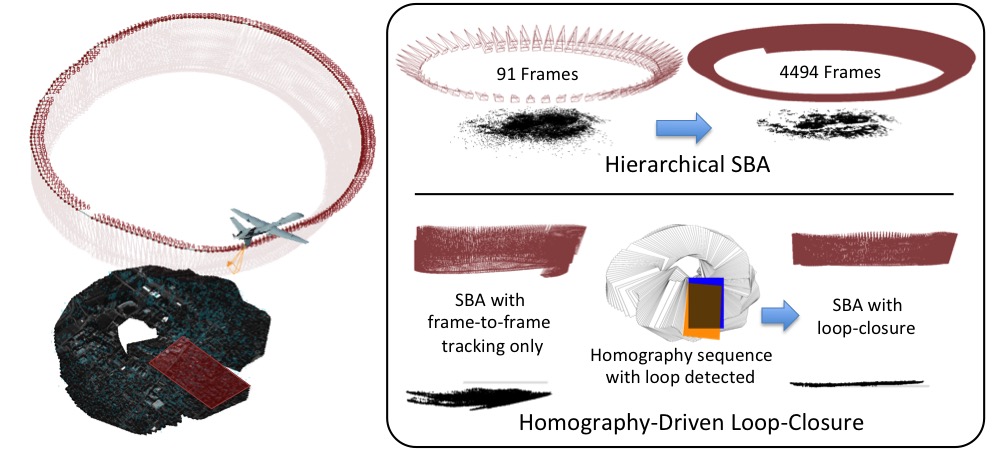
This project has similar goals as projects such as Bundler and VisualSFM. However, the focus is on efficiently processing aerial video instead of community photo collections. Special attention has been given to cases where the variation in depth of the 3D scene is small in comparison to the distance to the camera. In these cases, planar homographies can be used to assist feature tracking, stabilize the video, and aid in solving loop closure problems.
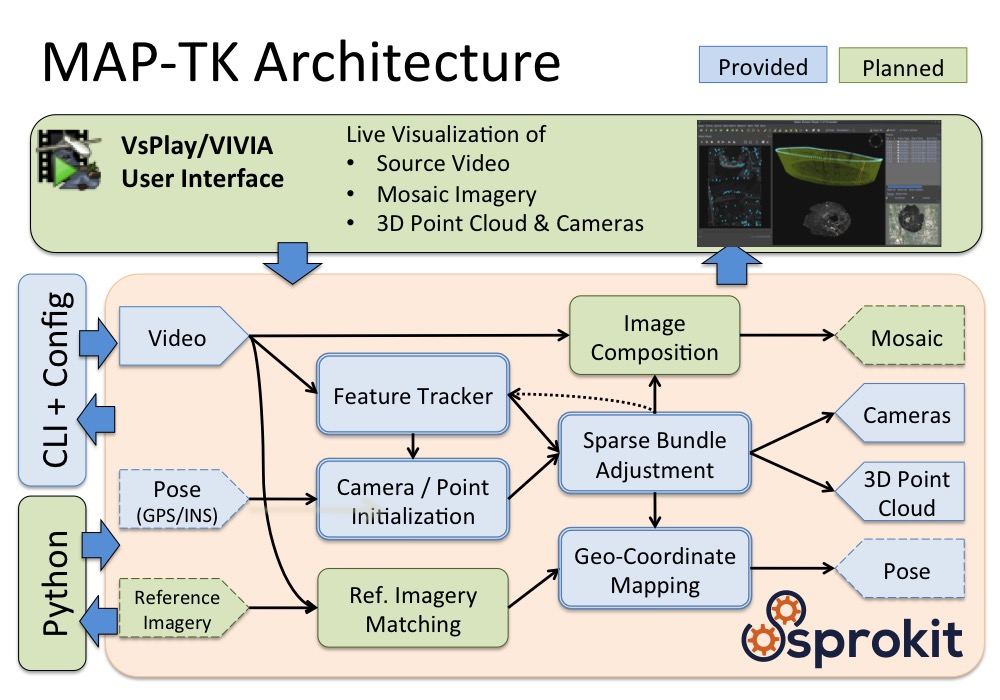
The MAP-Tk software architecture is highly modular and provides an algorithm abstraction layer that allows seamless interchange and run-time selection of algorithms from various other open-source projects such as OpenCV, VXL, VisCL, and PROJ4. The core library is lightweight with minimal dependencies. The tools are written to depend only on the MAP-Tk core library. Additional capabilities are provided in add-on modules that use third party libraries to implement various abstract algorithm interfaces defined in the core.
Bravo keep it coming!