Tracking a Swinging Crane Load with VeloView

Challenging conditions, such as maritime environments, can make it difficult to safely and efficiently operate a crane mounted on a floating vessel when the suspended load begins to swing. Craft Engineering Associates, Inc, is developing a system for crane stabilization that is suitable for installation on a wide range of shipboard cranes. This involves sensing the dynamic motion of the vessel and the orientation of the crane to actuate the controls to reduce the adverse effects of the ship’s motion. A major problem has been the effective measurement of any residual swinging of the load so that it may be damped. Kitware was approached to develop a LiDAR tracking solution to assist in this aspect of the crane stabilization project.
To track the position of the crane’s load, we paired a Velodyne LiDAR sensor with a customized version of the VeloView software. The crane, highlighted load, and surrounding environment are visible in the LiDAR sensor, as is shown in Figure 1.
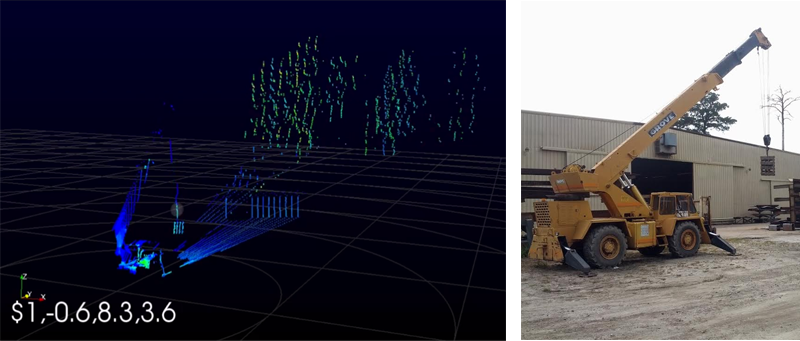
Figure 1: LiDAR scene showing crane, load, and surrounding environment.
The block above the load is highlighted, and its position in meters relative to the sensor is reported.
The customized version of VeloView implements algorithms and a user interface to track the crane’s load. The software enables the user to initialize the location of the tracked object in the recording or in the live playback. Then, the position of the object is automatically updated at every frame, or lost tracking is reported. The tracked position can be exported to the control system using a serial port connection in addition to the live 3D visualization. This output will enable the crane control system to compensate for any unexpected motion of the crane’s load. To test the system, we attached the scanner to the side of the crane and recorded data during operation of the crane.
A video demonstration of the results is available on Vimeo [1]. The success of this project highlights the adaptability of the open-source VeloView software for the development of custom analysis solutions and workflows.
References
[1] http://vimeo.com/114785401

Casey Goodlett is a Technical Leader at Kitware with expertise in business development, medical computing, and computer vision. Casey is currently focused on developing technology in point cloud processing in areas including visualization, registration, object detection, and software development.

J. Dexter Bird, III, is a Senior Design Engineer for Craft Engineering Associates, Inc. His specialty is the practical implementation of theory and advanced technology for electro-mechanical systems.