Velodyne: A Case Study in Open-Source Solutions

In 2013, Velodyne’s Director of Sales & Marketing, Wolfgang Juchmann, approached Kitware for help designing and developing a custom visualization and analysis application. Velodyne manufactures real-time, 3D LiDAR sensors that produce data streams on the order of a million data points per second from a multi-channel family of laser sensors (HDL-32E and HDL-64E). The sensors capture a full 360° 3D scan up to 20 times per second.
What Velodyne needed was software capable of showing the vast amount of data in a 3D environment, as well as the ability to live stream data from a sensor to the application. The custom software needed to be straightforward so that a novice user could experience and understand the 3D sensor data quickly without going through the training required for a complicated software package.
As a leader in visualization and open-source technology, Kitware was a natural partner for this effort. By leveraging the open-source toolkits ParaView and VTK, Kitware was able to very rapidly deploy an initial version of the application, VeloView. Kitware followed an agile development philosophy that incrementally improved the initial version with constant dialogue between the two companies, ensuring that customer needs and priorities were continuously incorporated in the development process.
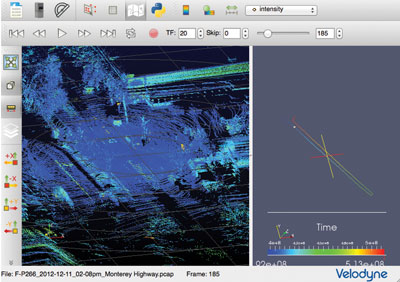
In the left panel VeloView overlays several consecutive 360° scans to visualize the 3D space around the vehicle. The right panel shows the position and GPS path of the car.
As a sensor hardware manufacturer, Velodyne further recognized the benefit provided by open-source access to VeloView’s source code, as it enables application developers to minimize time to market iterations.
“We use VeloView as a sales tool, providing current and potential customers with ready-to-use software,” Juchmann said. “The live-streaming feature provides us with the opportunity to offer real-time demonstrations of the sensor’s capabilities during customer visits and at conferences and tradeshows, which are guaranteed to generate excited audiences.”
Features
VeloView 2.0 was released in April. Key features of VeloView 2.0 include:
• Input from live sensor stream or pre-recorded data
• Visualization of LiDAR returns in 3D and time including 3D position and attribute data such as timestamp, azimuth, laser ID, etc.
• A spreadsheet inspector for LiDAR attributes
• The ability to record data from live sensor stream and export it in multiple formats
• A distance measurement ruler tool
• Visualization of GPS data in spreadsheet and map format
• The ability to show multiple frames (one 360° rotation) of data simultaneously
• The ability to show or hide a subset of laser channels

Casey Goodlett is a Technical Leader at Kitware, Inc., with expertise in business development, medical computing, and computer vision. Casey is currently focused on developing technology in point cloud processing including visualization, registration, object detection, and software development.

Brad Davis works closely with customers and the Kitware team to discover, define, and execute successful software R&D projects. His focus areas include medical image analysis, statistics of shape, pointcloud processing, and 3D interactive visualization.

Wolfgang Juchmann is Director of Sales and Marketing at Velodyne LiDAR (www.velodynelidar.com). He is responsible for the business development of Velodyne’s HDL line of real-time 3D LiDAR sensors with applications in autonomous driving, mobile mapping, and security/defense. For more information, contact lidar@velodyne.com.
IS there any open source software for processing velodyne’s data?
Hello Alvaro,
I’m following up by email with a detailed answer.
In short, yes, there is indeed VeloView, that Kitware still maintains and improves for Velodyne :
https://www.paraview.org/veloview/ with code here:
https://github.com/Kitware/VeloView
And there is also LidarView, a slight VeloView variant that Kitware maintain and develop on its own. It has interesting experimental features (SLAM, registration, … ), but may be unstable.
https://www.paraview.org/lidarview/ with code here:
https://github.com/Kitware/LidarView
Best regards,
Bastien Jacquet
LidarView / VeloView Project Lead
Hi Veloview is very useful for our application. One of the things we would like is to
1. select a set of points using Select All Points,
2. look at the points in Spreadsheet inspector for LiDAR attributes
3. Then select these points and copy it to an excel file.
I am not able to do step 3. If there a way this functionality can be added. to the spreadsheet inspector area ??