Why Sensor Manufacturers are Using LidarView
LidarView is Kitware’s versatile, highly-customizable tool for visualizing and analyzing streaming lidar data. It’s a cost-effective open source solution designed to meet your needs as well as the needs of your end users. There are many reasons why LidarView is becoming a valuable tool for sensor manufacturers.
Key Features of LidarView
LidarView offers advanced features that will compliment your sensors and enhance your user experience. In partnering with Kitware, you will be able to quickly integrate LidarView into your existing technology to take advantage of these key benefits:
Built on ParaView
LidarView is built on Kitware’s award-winning open source visualization platform, ParaView. ParaView is optimized for reading large point clouds and gives access to lidar data and visualization options through the embedded python console. Many of ParaView’s other functionalities are accessible within LidarView, including the ability to display properties to render the data differently, whether in shape, color mapping, etc. You can also take advantage of ParaView’s filters and animation views (Fig. 1).
Fig. 1 – Applying popular ParaView filters to point cloud data in LidarView
Interpreters
An essential part of LidarView is its interpreters. The interpreters translate the sensor’s network traffic data into a point cloud by using the sensor specification of the emitted data. This is different for each sensor manufacturer. LidarView can be adapted for any streaming lidar sensor connected to the Ethernet as long as the specification or an existing driver is available and a calibration file is provided by the manufacturer. LidarView already works with many different sensors, but Kitware can work with you to add more if it’s not already available and the sensor driver licensing allows it.
Multiple Sensors
You can visualize and process multiple sensors simultaneously using LidarView and move them according to an arbitrary transform (e.g. if you have a lidar configuration involving multiple sensors). For more details, see our recent blog post on VeloView 5.1, which contains the same functionality.
Extension Capabilities with Plug-ins
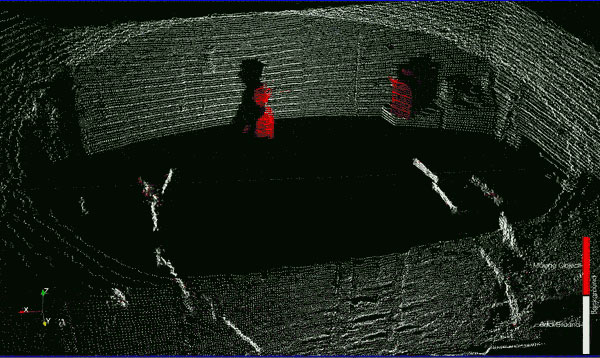
LidarView is capable of almost any type of lidar processing, whether based on single lidar frame or temporal data. For example, you can use temporal geometric consistency in the point cloud to detect a foreign object in a scene (Fig. 2). You could also use SLAM to reconstruct the environment where the lidar has been through and the trajectory that the lidar has taken during the movement. This information can then be used as a pre-processing step for other tasks on the reconstructed point cloud (read our blog post on Kitware’s recent advancement on loop closure in SLAM).
Additional examples of processing that can be performed and are still in development include adding semi-automatic segmentation tools and introducing additional sensors (e.g. camera for colorizing the point clouds or GPS for Geolocalization), deep learning for object detection, lidar scene completion, and more.
Fig. 2 – An example of differentiating points that belong to the background of a scene, which are updated when things stabilize. This duration would be tunable.
Readers & Streaming
In streaming mode, LidarView allows you to capture network traffic from sensors connected to your device through Ethernet and transform it into a point cloud. You can visualize and analyze the point cloud in real-time during the streaming process, which is ideal for live demonstrations or “on the fly processing” of the data coming out of your sensor. Streaming mode also enables you to record streamed data in .pcap format so that you can replay it later.
In reader mode, LidarView reads a whole capture of network traffic (in pcap format) and indexes all of the frames so that navigation in the file is fast, even for large point clouds. In both cases the output would be a set of frames available for visualization and processing.
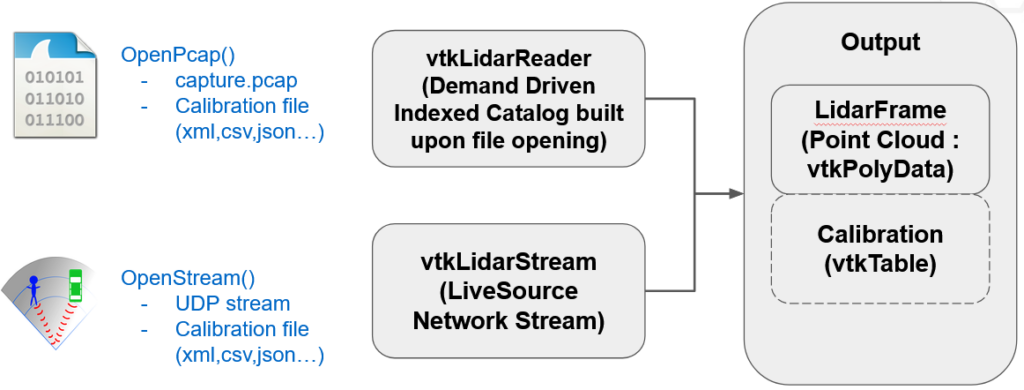
Abstraction layer for direct network streaming or reading captured files.
Point Cloud file(s) Reader
You can read point cloud data directly from your files, allowing you to interpret data outside of LidarView while still using LidarView as if it was a .pcap file. You can also recreate the temporal consistency from the output of your sensor (Fig. 3). LidarView also supports (available in the next release) reading some of the more commonly used point cloud formats (.pcd, .ply, .las/.laz, .e57) and the same import scheme may be applied to load temporal data. The LidarView team will continue growing support for more formats.
Fig 3 – An example of how to export point clouds from LidarView so the application understands that it’s a temporal series and can re-open them.
Export Formats
You can export files from LidarView to a variety of standard point cloud formats for analysis in other tools. In other words, you aren’t stuck solely using LidarView, but have the ability to continue using it in conjunction with tools you are already using in your workflow.
Fully Customizable
One of the biggest benefits of using LidarView is that it is fully customizable. And since it was developed by Kitware and built on ParaView, LidarView can be easily adapted to fit your needs (and the needs of your end-users), saving you both time and money. Contact us to learn more about customizing LidarView and what it is like to work with Kitware.